
De forma común para que todos los usuarios de GNSS (expertos en topografía e ingenieros) lo entiendan, la clave en la utilización de un receptor GPS para mediciones en catastro, GIS o topografía está en la corrección diferencial. Sin esta corrección diferencial el uso del receptor sería en autónomo con una precisión de más de dos metros, pudiendo ser incluso más, cercana a los diez o 20 metros en función de la calidad de la placa GNSS electrónica de su interior.
Este error se elimina en la corrección diferencial de los datos medidos GNSS. Dicha corrección puede ser en tiempo real (en el momento) o en posprocesamiento (a posteriori), siendo una comparación de las observaciones recopiladas por el usuario con las observaciones de una o más estaciones de referencia o base. La posición de estas estaciones de referencia casi siempre se conoce con un alto grado de precisión y deben de compartir el mismo marco de referencia o sistema de coordenadas que nuestros datos medidos y la fuente de corrección, para que el cálculo de la corrección diferencia tenga éxito.
Fuentes de corrección diferencial

Hay distintas fuentes de corrección, aquí las vamos a clasificar en locales o globales.
Las fuentes de corrección locales dependen de la proximidad de una red de estaciones de referencia de donde el usuario está recopilando datos de su proyecto. La precisión a parte de las características del receptor GNSS, vendrá dada por la distancia a la que estén estas estaciones de referencia.
Para tiempo real en corrección de cinemática (RTK) las más comunes son la de base única o de solución de red, incluido VRS). Las correcciones de estas fuentes generalmente se envían a través de conexiones de radio o basadas en IP (a través de internet).

Para posprocesado a través de un software especifico que permita el calculo de corrección diferencial, se descargan los datos de la estación de referencia del día y la hora en la que se han hecho las mediciones con el receptor GPS.
Las fuentes de corrección global generalmente se aplican a un área mucho más amplia, si no a todo el mundo, y dependen de una red más dispersa de estaciones de referencia. Los flujos de corrección pueden provenir desde satélites con la banda L (solo disponible por algunos fabricantes de equipos GNSS) y desde protocolos de internet (IP).
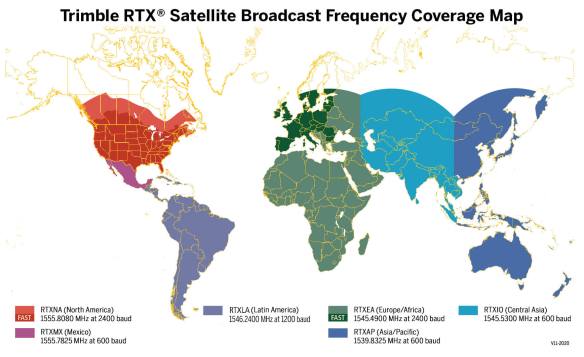
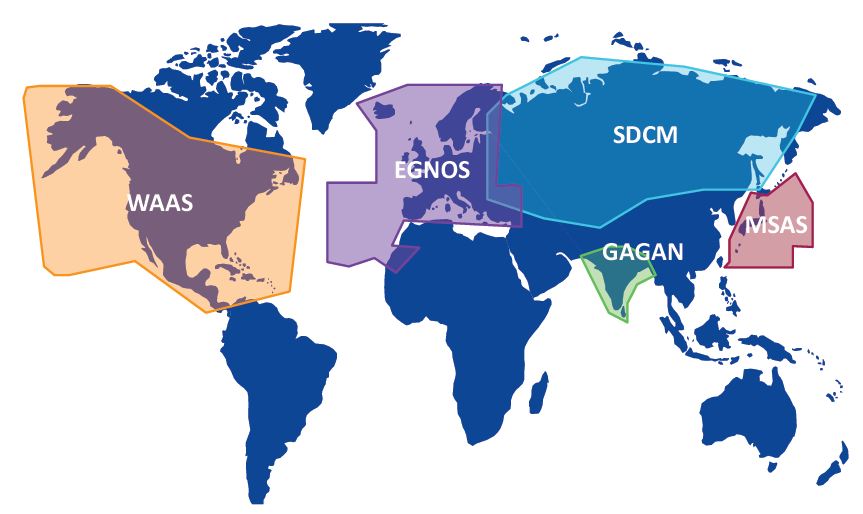
Los mas comunes son los sistemas de aumentación basado en satélites (SBAS) y la de banda L, que en el fabricante Trimble se conoce como RTX, disponible a nivel mundial.
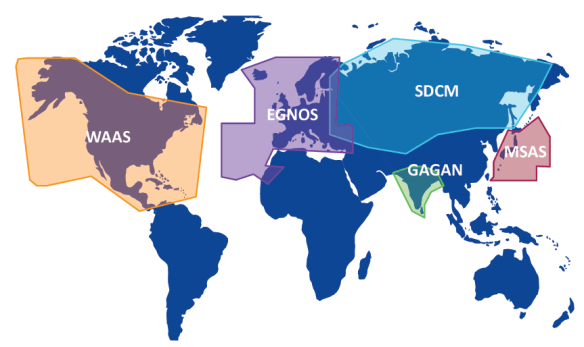
COBERTURA SBAS https://www.e-education.psu.edu/geog862/sites/www.e-education.psu.edu.geog862/files/images/Lesson07/SBASmap.png
Este artículo está basado en el siguiente post https://geospatial.trimble.com/blog/gnss-correction-services-and-geodetics
Si consideras el artículo interesante
– Difúndelo en las redes sociales y entre tus conocidos.
– Cuéntame que te ha parecido o si tienes alguna aportación que lo haga enriquecer, en el espacio de comentarios.
– Suscríbete a mi blog para recibir otros artículos futuros directamente en tu correo electrónico.
¡¡Muchas gracias!!, Un abrazo.

{kind=link}
{kind=link}